数式を使っていくつかの簡単な変換を行ってみましょう。 ニュートンの第 2 法則によれば、力は次のように求められます: F=m*a。 加速度は a=v⁄t で求められます。 したがって、次のようになります: F= ム*ブ/t.
体の運動量の決定: 公式
力は、時間の経過に伴う質量と速度の積の変化によって特徴付けられることがわかりました。 この積を特定の量で表すと、時間の経過に伴うこの量の変化が力の特性として得られます。 この量を物体の運動量といいます。 物体の運動量は次の式で表されます。
ここで、p は物体の運動量、m は質量、v は速度です。
運動量はベクトル量であり、その方向は常に速度の方向と一致します。 力積の単位はキログラム/メートル/秒 (1 kg*m/s) です。
身体インパルスとは何ですか:どう理解すればよいですか?
身体の衝動とは何なのか、「指で」簡単に理解してみましょう。 物体が静止している場合、その運動量は ゼロに等しい。 論理的。 物体の速度が変化すると、物体は、それに加えられる力の大きさを特徴付ける特定の衝撃を獲得します。
物体に衝撃はないが、物体が特定の速度で動く、つまり特定の衝撃がある場合、その衝撃は、それがどのような影響を与えることができるかを意味します 与えられた体他の身体と対話するとき。
力積の式には、物体の質量と速度が含まれます。 つまり、物体の質量や速度が大きくなるほど、影響力も大きくなります。 これは人生経験から明らかです。
質量の小さな物体を動かすには小さな力が必要です。 体重が重ければ重いほど、より多くの力を加える必要があります。 体に伝わる速度も同様です。 身体自体が他の身体に与える影響の場合、衝動はその身体が他の身体に作用できる大きさも示します。 この値は、元のボディの速度と質量に直接依存します。
物体相互作用時の衝撃
別の疑問が生じます: ある物体が別の物体と相互作用するとき、その物体の運動量はどうなるでしょうか? 物体の質量はそのままでは変化しませんが、速度は簡単に変化します。 この場合、物体の速度はその質量に応じて変化します。
実際、質量が大きく異なる物体が衝突すると、速度の変化が異なることは明らかです。 高速で飛行する場合 サッカーボールこの準備ができていない人、たとえば観客に衝突すると、観客は落ちる可能性があります。つまり、ある程度の速度が得られますが、ボールのように飛ぶことはありません。
それはすべて、観客の質量がボールの質量よりもはるかに大きいためです。 しかし同時に、これら 2 つの体の合計の運動量は変わりません。
運動量保存則:公式
これは運動量保存の法則です。2 つの物体が相互作用するとき、それらの合計運動量は変化しません。 運動量保存の法則は、閉じた系、つまり、外力の影響がない、または外力の総作用がゼロである系でのみ機能します。
実際には、物体のシステムはほとんど常に外部の影響を受けますが、エネルギーと同様に、全体的な衝動はどこにも消えたり、どこからともなく発生したりすることはなく、相互作用のすべての参加者に分配されます。
講義 10. 運動量保存の法則と反動運動。
自然界の動きは無から生じたり、消滅したりすることはなく、ある物体から別の物体へと伝達されます。 で 特定の条件、動きは蓄積することができますが、解放されると、保存される能力が明らかになります。
その理由を考えたことはありますか?
- サッカー選手は高速で飛んでくるボールを足や頭で止めることができますが、人はたとえ非常にゆっくりとレール上を移動するキャリッジを止めることはできません(キャリッジの質量はボールの質量よりはるかに大きいです)。
- コップ一杯の水が、細長い丈夫な紙の上に置かれます。 ストリップをゆっくり引くと、ガラスが紙と一緒に動きます。 そして、紙片を鋭く引っ張っても、ガラスは動かないままです。 (ガラスは慣性によって静止したままになります。これは、他の物体の作用がない場合に物体の速度を一定に維持する現象です)
- テニスボールが人に当たっても害はありませんが、弾丸は質量が小さく、高速(600〜800m/s)で移動するため、致命的であることが判明しました(弾丸の速度は非常に速い)ボールよりも高い)。
これは、物体の相互作用の結果が物体の質量と速度の両方に同時に依存することを意味します。
もう一人の偉大なフランスの哲学者、数学者、物理学者、生理学者、近代ヨーロッパ合理主義の創始者であり、現代で最も影響力のある形而上学者の一人は、「運動量」の概念を導入しました。 彼はまた、運動量保存の法則を表現し、力の力積の概念を与えました。
「宇宙には、決して増加も減少もしない一定量の動きが存在することを私は受け入れます。したがって、ある物体が別の物体を動かし始めると、それが伝えた分だけその動きを失うことになります。」 R.デカルト
デカルトは、彼の発言から判断すると、17 世紀に彼によって導入された運動量、または物体の運動量の概念の基本的な重要性を、物体の質量とその速度の値の積として理解しました。 そして、彼は運動量をベクトル量として考慮しないという間違いを犯しましたが、彼が定式化した運動量保存の法則は、時の試練に名誉をもって耐えてきました。 で XVIII 初期 20 世紀になって間違いは修正され、科学技術におけるこの法律の勝利の行進は今日まで続いています。
物理学の基本法則の 1 つとして、これは科学者に貴重な研究ツールを提供し、一部のプロセスを禁止し、他のプロセスに道を開きます。 爆発、ジェット機の動き、原子や核の変化 - この法則はどこでも完璧に機能します。 そして、日常の多くの状況において、衝動という概念が理解に役立つことを、今日、皆さん自身の目で確かめていただければ幸いです。
運動量は機械的運動の尺度であり、物質点とその質量の積に等しい メートルスピードのために v.移動量 MV-点の速度と同じように方向付けられるベクトル量。 運動量と呼ばれることもあります。 衝動。 あらゆる瞬間の動きの量は次のように特徴づけられます。 スピードある対象 大衆空間内のある点から別の点に移動するとき。
身体の衝動(または動きの量) 物体の質量と速度の積に等しいベクトル量と呼ばれます。

身体の衝動 体の速度と同じ方向に向けられる.

測定単位 SI の勢いは 1kgm/秒。
物体の運動量の変化は、衝突時など物体が相互作用するときに発生します。 (ビデオ「ビリヤード ボール」) 身体が相互作用するとき 脈ある身体を部分的または完全に別の身体に移すことができます。
衝突の種類:
絶対的に非弾性の衝撃- これは、物体が互いに接続 (くっつき) し、1 つの物体としてさらに移動する衝撃インタラクションです。


弾丸はブロックに突き刺さり、粘土の一部が壁にくっついて動きます。
絶対弾性インパクト- これは物体系の力学的エネルギーが保存される衝突です。


衝突後、ボールは互いに跳ね返ります 異なる側面ボールが壁に当たって跳ね返る
質量 m の物体に、ある短期間 Δt の間、力 F が作用するとします。
この力の影響で、体の速度は次のように変化します。 ![]()
したがって、時間 Δt の間、物体は加速度を持って移動しました。 
力学の基本法則 (ニュートンの第 2 法則) からは次のようになります。
力とその作用時間の積に等しい物理量、と呼ばれる 力の衝動:
力の衝動もまた、 ベクトル量.
力の推進力は体の運動量の変化に等しい (インパルス形式のニュートン II 法則):

物体の運動量を文字 p で表すと、ニュートンの第 2 法則は次のように書くことができます。 
まさにこの中に 全体像ニュートン自身が第二法則を定式化しました。 この式の力は、物体に加えられるすべての力の合力を表します。
運動量の変化を判断するには、パルス ベクトルとパルスの和のベクトルを表すパルス ダイアグラムを使用すると便利です。

機械的な問題を考えるとき、私たちは特定の数の物体の動きに興味を持ちます。 私たちがその動きを研究する物体のセットは次のように呼ばれます。 機械系または単なるシステム。
力学では、異なる方法で移動する複数の物体を同時に考慮する必要がある場合に問題が発生することがよくあります。 これらは、たとえば、モーションに関する問題です。 天体、物体の衝突について、銃器の反動について、発砲後に発射体と銃の両方が動き始める場所など。これらの場合、彼らは物体系の動きについて話します。 2 つの物体が衝突するシステム、「銃 - 発射体」システムなど。n. システムの物体間に何らかの力が作用します。 で 太陽系これは強さです 万有引力、物体の衝突システムでは - 弾性力、「銃 - 発射体」システムでは - 粉末ガスによって生成される力。

物体システムの力積は、各物体の力積の合計に等しくなります。 システムに含まれています。
システムの一部の物体から他の物体に作用する力 (「内部力」) に加えて、システムに属さない物体からの力 (「外部」力) も物体に作用することがあります。 たとえば、重力とテーブルの弾性は衝突するビリヤード ボールにも作用し、重力は大砲や発射体にも作用します。ただし、多くの場合、すべての外力は無視できます。 したがって、転がるボールの衝突を研究する場合、重力は各ボールに対して個別にバランスが取られるため、ボールの動きには影響しません。 大砲から発射される場合、重力は砲身から離れた後にのみ発射体の飛行に影響を及ぼし、反動の大きさには影響しません。 したがって、外部の力が存在しないと仮定して、物体系の動きを考えることができます。
物体のシステムが他の物体からの外力の影響を受けない場合、そのようなシステムは閉じていると呼ばれます。
クローズドシステム – これは相互にのみ相互作用する身体のシステムです.
運動量保存則。
閉じたシステムでは、システムに含まれるすべての物体のインパルスのベクトル和は、このシステムの物体が互いに相互作用しても一定のままです。


運動量保存の法則は、幅広い自然現象を説明する基礎として機能し、さまざまな科学で使用されています。
- 発砲時の反動現象には法則が厳守されており、 ジェット推進、爆発現象や物体の衝突現象。
- 運動量保存則は、爆発や衝突時の物体の速度を計算するときに使用されます。 ジェット機を計算するとき。 軍事産業では兵器を設計する際に。 技術分野 - 杭の打ち込み、金属の鍛造など。
身体の衝動
物体の運動量は、物体の質量と速度の積に等しい量です。
覚えておくべきことは、 私たちが話しているのは素材点として表現できる身体について。 物体の運動量 ($p$) は運動量とも呼ばれます。 運動量の概念は、ルネ デカルト (1596–1650) によって物理学に導入されました。 「インパルス」という用語は後に登場しました(インパルスはラテン語で「押す」を意味します)。 運動量はベクトル量 (速度など) であり、次の式で表されます。
$p↖(→)=mυ↖(→)$
運動量ベクトルの方向は常に速度の方向と一致します。
力積の SI 単位は、質量 $1$ kg の物体が $1$ m/s の速度で移動する力積です。したがって、力積の単位は $1$ kg $·$ m/s です。
一定の力が $∆t$ の期間中物体 (質点) に作用する場合、加速度も一定になります。
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(Δt)$
ここで $(υ_1)↖(→)$ と $(υ_2)↖(→)$ は物体の初期速度と最終速度です。 この値をニュートンの第 2 法則の式に代入すると、次のようになります。
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
括弧を開いて体の運動量の式を使用すると、次のようになります。
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
ここで $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ は時間の経過に伴う運動量の変化 $∆t$ です。 すると、前の式は次の形式になります。
$∆p↖(→)=F↖(→)∆t$
$∆p↖(→)=F↖(→)∆t$ という式は、ニュートンの第 2 法則を数学的に表現したものです。
力とその作用の持続時間の積をといいます。 力の衝動。 それが理由です 点の運動量の変化は、そこに作用する力の運動量の変化に等しい。
$∆p↖(→)=F↖(→)∆t$ という式が呼び出されます。 体の運動方程式。 同じ動作、つまり点の運動量の変化は、長期間にわたって小さな力によって達成できることに注意してください。 大きな力短期間で。
システムのインパルス Tel. 運動量変化の法則
力積(運動量) 機械系は、このシステムのすべての物質点の運動量の合計に等しいベクトルと呼ばれます。
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
変化の法則と運動量保存の法則は、ニュートンの第 2 法則と第 3 法則の結果です。
2 つの物体から構成されるシステムを考えてみましょう。 系の物体が相互に作用する力 (図中の $F_(12)$ と $F_(21)$ ) を内部力と呼びます。
系に内力に加えて外力 $(F_1)↖(→)$ と $(F_2)↖(→)$ が作用するものとします。 各物体について、方程式 $∆p↖(→)=F↖(→)∆t$ を書くことができます。 これらの方程式の左辺と右辺を加算すると、次のようになります。
$(Δp_1)↖(→)+(Δp_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
ニュートンの第 3 法則によれば、$(F_(12))↖(→)=-(F_(21))↖(→)$ となります。
したがって、
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
左側には、 幾何学和システムのすべての物体の力積の変化は、システム自体の力積の変化に等しい - $(∆p_(syst))↖(→)$ これを考慮すると、等式 $(∆p_1)↖ (→)+(∆p_2)↖(→)=( (F_1)↖(→)+(F_2)↖(→))∆t$ と書くことができます。
$(∆p_(syst))↖(→)=F↖(→)∆t$
ここで、$F↖(→)$ は、物体に作用するすべての外力の合計です。 得られた結果は、系の運動量は外力によってのみ変化することができ、系の運動量の変化は外力全体と同じ方向に向けられることを意味します。
これが機械システムの運動量変化の法則の本質です。
内部の力はシステムの全体的な運動量を変えることはできません。 それらはシステムの個々の本体のインパルスを変更するだけです。
運動量保存則
方程式 $(∆p_(syst))↖(→)=F↖(→)∆t$ から、運動量保存則が成り立ちます。 システムに外力が作用しない場合、方程式 $(∆p_(syst))↖(→)=F↖(→)∆t$ の右辺はゼロになり、システムの総運動量は変化しないことを意味します。 :
$(Δp_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$ 外力が作用しない、または外力の合力がゼロになる系を といいます。
閉まっている。
運動量保存の法則は次のように述べています。
得られた結果は、任意の数の物体を含むシステムに対して有効です。 外力の合計がゼロに等しくないが、ある方向への外力の投影の合計がゼロに等しい場合、その方向へのシステムの運動量の投影は変化しません。 したがって、たとえば、地球の表面上の物体のシステムは、すべての物体に作用する重力のため閉じていると考えることはできませんが、水平方向への衝撃の投影の合計は(存在しない場合には)変化しないままである可能性があります。この方向では重力が作用しないためです。
ジェット推進
運動量保存則の妥当性を確認する例を考えてみましょう。
子供用のゴムボールを用意し、膨らませて放してみましょう。 空気が一方向に抜け始めると、ボール自体が反対方向に飛ぶことがわかります。 ボールの運動はジェット運動の一例です。 これは運動量保存の法則によって説明されます。つまり、空気が流出する前の「ボールとその中の空気」システムの合計運動量はゼロです。 移動中はゼロに等しくなければなりません。 したがって、ボールはジェットの流れの方向と反対の方向に、その運動量が空気ジェットの運動量と等しい速度で移動します。
ジェットモーション物体の一部が任意の速度で離れるときに生じる物体の動きを指します。 運動量保存の法則により、物体の移動方向は、分離された部分の移動方向と逆になります。
ロケットの飛行はジェット推進の原理に基づいています。 現代の宇宙ロケットは非常に複雑な航空機です。 ロケットの質量は、作動流体(つまり、燃料の燃焼の結果として形成され、ジェット流の形で放出される高温ガス)の質量と、最終的な、または彼らが言うところの「乾燥」質量で構成されます。作動流体がロケットから射出された後に残るロケット。
ロケットからガスジェットが高速で噴射されると、ロケット自体が逆方向に突進します。 運動量保存則によれば、ロケットが獲得する運動量 $m_(p)υ_p$ は、噴出するガスの運動量 $m_(gas)・υ_(gas)$ と等しくなければなりません。
$m_(p)υ_p=m_(ガス)・υ_(ガス)$
つまり、ロケットの速度は
$υ_p=((m_(ガス))/(m_p))・υ_(ガス)$
この公式から、ロケットの速度が大きくなるほど、放出されるガスの速度と、最終(「乾燥」)流体に対する作動流体の質量(つまり、燃料の質量)の比も大きくなることが明らかです。ロケットの質量。
式 $υ_p=((m_(gas))/(m_p))・υ_(gas)$ は近似値です。 燃料が燃焼するにつれて、飛行するロケットの質量が徐々に減少することは考慮されていません。 ロケット速度の正確な公式は 1897 年に K. E. ツィオルコフスキーによって得られ、彼の名前が付けられています。
力の働き
「仕事」という用語は、1826 年にフランスの科学者 J. ポンスレによって物理学に導入されました。 日常生活において人間の労働のみが仕事と呼ばれる場合、物理学、特に力学では、仕事は力によって行われることが一般に受け入れられています。 仕事の物理量は通常、$A$ という文字で表されます。
力の働き力の作用の尺度であり、その大きさと方向、および力の作用点の変位に依存します。 一定の強度と 直線運動仕事は次の等式によって決定されます。
$A=F|∆r↖(→)|cosα$
ここで、$F$ は物体に作用する力、$∆r↖(→)$ は変位、$α$ は力と変位の間の角度です。

力の仕事は、力と変位の係数とそれらの間の角度の余弦の積に等しくなります。 スカラー積ベクトル $F↖(→)$ と $∆r↖(→)$
仕事はスカラー量です。 $α 0$の場合、$90°の場合
複数の力が物体に作用する場合、総仕事量 (すべての力の仕事量の合計) は、結果として生じる力の仕事量と等しくなります。
SI の作業単位は次のとおりです。 ジュール($1$ J)。 $1$ J は、$1$ N の力によって、この力の作用方向に $1$ m の経路に沿って行われる仕事です。 この単位はイギリスの科学者 J. Joule (1818-1889) にちなんで名付けられました。 $1$ J = $1$ N $·$ m キロジュールとミリジュールもよく使用されます: $1$ kJ $= 1,000$ J、$1$ mJ $。 = 0.001 ドル J.
重力の働き
傾斜角 $α$、高さ $H$ の傾斜面に沿って滑る物体を考えます。

$∆x$ を $H$ と $α$ で表現してみます。
$Δx=(H)/(sinα)$
重力 $F_т=mg$ が移動方向に対して角度 ($90° - α$) をなすことを考慮し、式 $∆x=(H)/(sin)α$ を使用すると、次の式が得られます。重力仕事 $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
この式から、重力によって行われる仕事は高さに依存し、平面の傾斜角には依存しないことが明らかです。
したがって、次のようになります。
- 重力の働きは、物体が移動する軌道の形状には依存せず、物体の最初と最後の位置にのみ依存します。
- 物体が閉じた軌道に沿って移動するとき、重力によって行われる仕事はゼロです。つまり、重力は保存的な力です (この性質を持つ力は保存的と呼ばれます)。
反力の働き, 反力 ($N$) は変位 $∆x$ に対して垂直な方向を向いているため、 はゼロに等しくなります。
摩擦力の仕事
摩擦力は変位 $∆x$ と反対の方向を向き、変位と $180°$ の角度をなすため、摩擦力の仕事は負になります。
$A_(tr)=F_(tr)Δx・cos180°=-F_(tr)・Δx$
$F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα) なので、$
$A_(tr)=μmgHctgα$
弾性力の仕事
長さ $l_0$ の伸びていないばねに外力 $F↖(→)$ が作用し、$∆l_0=x_0$ だけ引き伸ばされます。 $x=x_0F_(control)=kx_0$ の位置にあります。 点$x_0$で力$F↖(→)$が作用しなくなった後、力$F_(control)$の作用によりばねが圧縮されます。

ばねの右端の座標が$x_0$から$x$に変化するときの弾性力の働きを求めてみましょう。 この領域の弾性力は線形に変化するため、フックの法則ではこの領域の平均値を使用できます。
$F_(制御平均)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
この場合、仕事は (方向 $(F_(control av.))↖(→)$ と $(∆x)↖(→)$ が一致するという事実を考慮すると、次のようになります。
$A_(制御)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
最後の式の形式は $(F_(control av.))↖(→)$ と $(∆x)↖(→)$ の間の角度に依存しないことがわかります。 弾性力の働きは、初期状態と最終状態のばねの変形のみに依存します。
したがって、弾性力は重力と同様に保存的な力です。
パワーパワー
力 - 物理量、作業が実行された期間に対する作業の比率によって測定されます。
言い換えれば、電力は、単位時間あたりにどれだけの作業が行われるかを示します (SI 単位 - $1$ s あたり)。
電力は次の式で求められます。
ここで、$N$ は電力、$A$ は時間 $∆t$ 中に行われた仕事です。
仕事 $A$ の代わりに式 $N=(A)/(Δt)$ に式 $A=F|(Δr)↖(→)|cosα$ を代入すると、次のようになります。
$N=(F|(Δr)↖(→)|cosα)/(Δt)=Fυcosα$
パワーは、力ベクトルと速度ベクトルの大きさと、これらのベクトルの間の角度の余弦との積に等しくなります。
SI システムの電力はワット (W) で測定されます。 1 ワット ($1$ W) は、$1$ s の間に $1$ J の仕事が行われる電力です: $1$ W $= 1$ J/s。
このユニットは、最初の蒸気エンジンを製造したイギリスの発明家 J. ワット (ワット) にちなんで名付けられました。 J. ワット自身 (1736-1819) は、別の動力単位である馬力 (hp) を使用しました。これは、蒸気機関と馬の性能を比較できるようにするために導入したものです。$1$ hp です。 $= 735.5$ W.
テクノロジーでは、より大きな電力単位がよく使用されます - キロワットとメガワット: $1$ kW $= 1000$ W、$1$ MW $= 1000000$ W。
運動エネルギー。 運動エネルギーの変化の法則
1 つの物体または複数の相互作用する物体 (物体のシステム) が仕事をできる場合、それらにはエネルギーがあると言われます。
「エネルギー」という言葉(ギリシャ語のエネルゲイアから - 行動、活動)は日常生活でよく使われます。 例えば、仕事が早くできる人は元気、エネルギーが大きいと言われます。
物体の運動によってもたらされるエネルギーを運動エネルギーといいます。
一般的なエネルギーの定義の場合と同様に、運動エネルギーについても、運動エネルギーとは動く物体が仕事をする能力であると言えます。
速度 $υ$ で運動する質量 $m$ の運動エネルギーを求めてみましょう。 運動エネルギーは運動によるエネルギーなので、そのゼロの状態は体が静止している状態です。 物体に特定の速度を与えるために必要な仕事がわかったら、その運動エネルギーを見つけます。
そのために、力ベクトル$F↖(→)$と変位$∆r↖(→)$の方向が一致したときの変位$∆r↖(→)$の領域の仕事を計算してみます。 この場合、仕事は同等です
ここで、$∆x=∆r$

加速度 $α=const$ を持つ点の運動の場合、変位の式は次の形式になります。
$∆x=υ_1t+(at^2)/(2),$
ここで、$υ_1$ は初速度です。
$Δx=υ_1t+(at^2)/(2)$ の $Δx$ の式を方程式 $A=F・Δx$ に代入し、ニュートンの第 2 法則 $F=ma$ を使用すると、次のようになります。
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
加速度を初期速度 $υ_1$ と最終速度 $υ_2$ で表し、 $a=(υ_2-υ_1)/(t)$ を代入し、 $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ となります:
$A=(m(υ_2-υ_1))/(2)・(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
等価になったので 初速ゼロへ: $υ_1=0$、次の式が得られます。 運動エネルギー:
$E_K=(mυ)/(2)=(p^2)/(2m)$
このように、動く物体には運動エネルギーがあります。 このエネルギーは、物体の速度をゼロから値 $υ$ まで増加させるために行われなければならない仕事に等しい。
$E_K=(mυ)/(2)=(p^2)/(2m)$ より、物体をある位置から別の位置に移動させる力によって行われる仕事は、運動エネルギーの変化に等しいことがわかります。
$A=E_(K_2)-E_(K_1)=ΔE_K$
$A=E_(K_2)-E_(K_1)=ΔE_K$ は等式を表します。 運動エネルギーの変化に関する定理。
体の運動エネルギーの変化一定時間(質点)が物体に働く力が、この間に行った仕事に等しい。
位置エネルギー
位置エネルギーは、相互作用する物体または同じ物体の一部の相対位置によって決定されるエネルギーです。
エネルギーは物体が仕事をする能力として定義されるため、位置エネルギーは当然、物体の相対的な位置にのみ依存して、力によって行われる仕事として定義されます。 これは重力の仕事 $A=mgh_1-mgh_2=mgH$ と弾性の仕事です。
$A=(kx_0^2)/(2)-(kx^2)/(2)$
体の位置エネルギー地球と相互作用するとき、彼らはこの物体の質量 $m$ に自由落下の加速度 $g$ と地表からの物体の高さ $h$ を掛けた積に等しい量を次のように呼びます。
弾性変形した物体の位置エネルギーは、物体の弾性 (剛性) 係数 $k$ と変形 $Δl$ の 2 乗の積の半分に等しい値です。
$E_p=(1)/(2)k∆l^2$
$E_p=mgh$ と $E_p=(1)/(2)k∆l^2$ を考慮した保存力の仕事 (重力と弾性) は次のように表されます。
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-ΔE_p$
この式により、次のことが可能になります。 一般的な定義位置エネルギー。
システムの位置エネルギーは物体の位置に依存する量であり、システムが初期状態から最終状態に移行する間の変化は、システムの内部保存力の仕事に等しくなります。反対の符号で撮影されます。
方程式 $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-ΔE_p$ の右側のマイナス記号は、内力によって仕事が行われるとき (たとえば、「岩石-地球」システムでは重力の影響下で物体が地面に落下すると、システムのエネルギーが減少します。 システム内の位置エネルギーの仕事と変化は常に反対の符号を持ちます。
仕事は位置エネルギーの変化だけを決定するので、 物理的な意味力学ではエネルギーの変化しかありません。 したがって、ゼロ エネルギー レベルの選択は任意であり、対応する方程式の記述の容易さなどの利便性を考慮してのみ決定されます。
機械エネルギーの変化と保存の法則
システムの総機械エネルギーその運動エネルギーと位置エネルギーの合計は次のように呼ばれます。
それは物体の位置 (位置エネルギー) とその速度 (運動エネルギー) によって決まります。
運動エネルギー定理によれば、
$E_k-E_(k_1)=A_p+A_(pr),$
ここで、$A_p$ は潜在力の働き、$A_(pr)$ は非潜在力の働きです。
さらに、位置力の仕事は、初期 $E_(p_1)$ 状態と最終 $E_p$ 状態における物体の位置エネルギーの差に等しくなります。 これを考慮すると、次の式が得られます。 力学的エネルギーの変化の法則:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
ここで、等式の左側は総力学的エネルギーの変化、右側は非位置力の仕事です。
それで、 力学的エネルギーの変化の法則読みます:
システムの機械的エネルギーの変化は、すべての非位置力の仕事に等しくなります。
潜在的な力のみが作用する機械システムは保守的と呼ばれます。
保守的なシステムでは $A_(pr) = 0$ です。 続いて 機械エネルギー保存則:
閉じた保存系では、総機械エネルギーは保存されます (時間とともに変化しません)。
$E_k+E_p=E_(k_1)+E_(p_1)$
機械的エネルギー保存の法則は、物質点 (またはマクロ粒子) の系に適用できるニュートンの力学法則から導出されます。
ただし、機械的エネルギー保存則は微粒子系にも当てはまり、ニュートンの法則自体は適用されなくなります。
機械的エネルギー保存の法則は、時間の一様性の結果です。
時間の均一性つまり、同じ初期条件の下では、物理プロセスの発生は、これらの条件がどの時点で作成されるかに依存しません。
全力学的エネルギー保存の法則は、保存系の運動エネルギーが変化すると、その合計が一定になるように位置エネルギーも変化する必要があることを意味します。 これは、ある種類のエネルギーを別の種類のエネルギーに変換する可能性を意味します。
によると いろいろな形物質の運動では、さまざまな種類のエネルギーが考慮されます。機械的エネルギー、内部エネルギー(物体の質量中心に対する分子の混沌とした運動の運動エネルギーと分子の相互作用の位置エネルギーの合計に等しい)、電磁気的、化学的(電子の運動の運動エネルギーと、電子同士の相互作用の電気エネルギーで構成されます) 原子核)、原子力など。上記から、エネルギーを次のように分割することは明らかです。 さまざまな種類かなり条件付き。
自然現象は通常、ある種類のエネルギーから別の種類のエネルギーへの変換を伴います。 たとえば、さまざまな機構の部品の摩擦により、機械エネルギーが熱に変換されます。 内部エネルギー。逆に、熱機関では、内部エネルギーが機械エネルギーに変換されます。 ガルバニ電池では、化学エネルギーが電気エネルギーなどに変換されます。
現在、エネルギーの概念は物理学の基本概念の 1 つです。 この概念は、ある運動形態を別の運動形態に変換するというアイデアと密接に結びついています。
現代物理学におけるエネルギーの概念は次のように定式化されます。
エネルギーは、あらゆる種類の物質の運動と相互作用の一般的な定量的尺度です。 エネルギーは無から現れたり消えたりすることはなく、ある形から別の形に移動することしかできません。 エネルギーの概念は、すべての自然現象を結び付けます。
シンプルな仕組み。 機構効率
単純な機構とは、物体に加えられる力の大きさや方向を変える装置です。
大きな荷物を少しの力で移動したり持ち上げたりするために使用されます。 これらには、レバーとその種類 - ブロック(可動および固定)、ゲート、傾斜面とその種類 - くさび、ネジなどが含まれます。
レバー。 レバレッジルール
レバーは 固体、固定されたサポートの周りを回転することができます。

レバレッジの法則には次のようなものがあります。
レバーにかかる力が腕に反比例する場合、レバーは平衡状態にあります。
$(F_2)/(F_1)=(l_1)/(l_2)$
式 $(F_2)/(F_1)=(l_1)/(l_2)$ に比例の性質を適用すると、次のようになります (比例の極項の積は中項の積に等しい)。次の式を得ることができます。
ただし、$F_1l_1=M_1$ はレバーを時計回りに回そうとする力のモーメント、$F_2l_2=M_2$ はレバーを反時計回りに回そうとする力のモーメントです。 したがって、$M_1=M_2$ となり、これを証明する必要があります。
レバーは人々によって使われ始めました。 古代。 その助けを借りて、ピラミッドの建設中に重い石の板を持ち上げることができました。 古代エジプト。 レバレッジがなければこれは不可能です。 結局のところ、たとえば、高さ147ドルメートルのクフ王のピラミッドの建設には、200万個以上の石のブロックが使用され、最も小さいものでも重量は2.5ドルトンでした。
現在、レバーは生産現場 (クレーンなど) と日常生活 (ハサミ、ワイヤー カッター、秤) の両方で広く使用されています。
固定ブロック
固定ブロックの動作は、同じアームを備えたレバーの動作と似ています: $l_1=l_2=r$。 加えられる力 $F_1$ は荷重 $F_2$ に等しく、平衡条件は次のとおりです。
固定ブロック力の大きさを変えずに力の方向を変える必要がある場合に使用されます。
可動ブロック
移動ブロックは、アームが $l_2=(l_1)/(2)=r$ であるレバーと同様に機能します。 この場合、平衡条件は次の形式になります。
ここで、$F_1$ は加えられる力、$F_2$ は荷重です。 移動ブロックを使用すると、強度が 2 倍になります。
滑車ホイスト(ブロック方式)
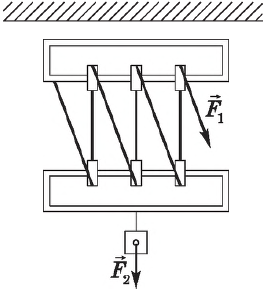
通常のチェーン ホイストは、$n$ の移動ブロックと $n$ の固定ブロックで構成されます。 これを使用すると、$2n$ 倍の強度が得られます。
$F_1=(F_2)/(2n)$
パワーチェーンブロック n 個の可動ブロックと 1 個の固定ブロックで構成されます。 動力滑車を使用すると、$2^n$ 倍の強度が得られます。
$F_1=(F_2)/(2^n)$

スクリュー
ネジは 傾斜面、軸の周りに巻かれます。
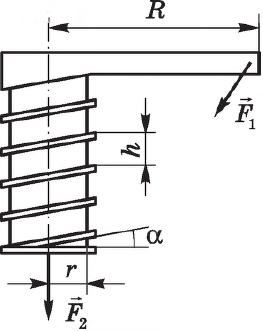
プロペラに作用する力の平衡状態は次の形式になります。
$F_1=(F_2h)/(2πr)=F_2tgα、F_1=(F_2h)/(2πR)$

ここで、$F_1$ はプロペラに加えられ、その軸から $R$ の距離で作用する外力です。 $F_2$ はプロペラ軸の方向に作用する力です。 $h$ — プロペラのピッチ。 $r$ — 平均半径スレッド。 $α$はねじ山の傾斜角度です。 $R$ は、$F_1$ の力でネジを回転させるレバー (レンチ) の長さです。
効率
係数 役立つアクション(効率) - 費やされたすべての作業に対する有用な作業の比率。
効率はパーセンテージで表されることが多く、ギリシャ文字 $η$ (「これ」) で表されます。
$η=(A_п)/(A_3)・100%$
$A_n$ — 役に立つ仕事, $A_3$ は費やされたすべての作業です。
有用な仕事は、常に、人が何らかのメカニズムを使用して費やす総仕事量の一部にすぎません。
行われる作業の一部は、摩擦力を克服するために費やされます。 $A_3 > A_n$ であるため、効率は常に $1$ (または $< 100%$).
この等式における各仕事は、対応する力と移動距離の積として表現できるため、$F_1s_1≈F_2s_2$ と書き換えることができます。
したがって、 有効なメカニズムの助けを借りて勝つことも、途中で同じ回数負けることもあり、またその逆も同様です。。 この法則は力学の黄金律と呼ばれます。
力学の黄金律は、使用されるデバイスの部品の摩擦や重力に打ち勝つ仕事を考慮していないため、近似法則です。 それでも、単純なメカニズムの動作を分析する場合には非常に役立ちます。

したがって、たとえば、このルールのおかげで、図に示されている作業者は、荷物を持ち上げる力が $10$ cm 倍になり、レバーの反対側の端を $20 下げる必要があるとすぐに言うことができます。ドルセンチメートル。
物体の衝突。 弾性衝撃と非弾性衝撃
運動量と機械的エネルギーの保存の法則は、衝突後の物体の運動の問題を解決するために使用されます。衝突前の既知の力積とエネルギーから、これらの量の値は衝突後に決定されます。 弾性衝撃と非弾性衝撃の場合を考えてみましょう。
衝撃は完全非弾性と呼ばれ、その後物体は一定の速度で移動する単一の物体を形成します。 後者の速度の問題は、衝突前後の質量 $m_1$ と $m_2$ の物体系 (2 つの物体について話している場合) の運動量保存の法則を使用して解決されます。
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
非弾性衝撃中の物体の運動エネルギーは保存されないことは明らかです (たとえば、$(υ_1)↖(→)=-(υ_2)↖(→)$ および $m_1=m_2$ では、次のようになります。 ゼロに等しい衝撃後)。
衝撃は絶対弾性と呼ばれ、衝撃の合計だけでなく、衝撃の合計も保存されます。 運動エネルギー体を殴る。
絶対的な弾性衝撃の場合、次の方程式が有効です。
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
ここで、$m_1、m_2$ はボールの質量、$υ_1、υ_2$ は衝突前のボールの速度、$υ"_1、υ"_2$ は衝突後のボールの速度です。
インパルス物体の(運動量)とは、物体の並進運動の定量的特性である物理ベクトル量である。 衝動は指定される r。 物体の運動量は、物体の質量と速度の積に等しくなります。 それは次の式で計算されます。
運動量ベクトルの方向は、物体の速度ベクトルの方向 (軌道の接線方向) と一致します。 推力の単位はkg・m/sです。
物体系の総運動量等しい ベクターシステムのすべての物体の力積の合計:
一つの物体の運動量の変化は次の式で求められます (最終インパルスと初期インパルスの差はベクトルであることに注意してください)。
![]()
どこ: p n – 体内のインパルス 始まりの瞬間時間、 p k – 最後まで。 重要なことは、最後の 2 つの概念を混同しないことです。
絶対弾性インパクト– 衝撃の抽象モデル。摩擦や変形などによるエネルギー損失は考慮されていません。 直接接触以外の相互作用は考慮されません。 固定面への絶対弾性衝撃では、衝撃後の物体の速度は衝撃前の物体の速度と大きさが等しくなります。つまり、力積の大きさは変化しません。 変更できるのは方向だけです。 この場合、入射角は 角度に等しい反省。
絶対的に非弾性の衝撃- 打撃。その結果、体が接続され、単一の体としてさらなる動きを続けます。 たとえば、粘土のボールが表面に落ちると、その動きは完全に停止します。2 台の車が衝突すると、自動カプラーが作動し、さらに動き続けます。
運動量保存則
物体が相互作用すると、ある物体の衝撃が部分的または完全に別の物体に伝達されることがあります。 物体のシステムが他の物体からの外力の作用を受けない場合、そのようなシステムはと呼ばれます。 閉まっている.
閉じたシステムでは、システムに含まれるすべての物体のインパルスのベクトル和は、このシステムの物体が互いに相互作用しても一定のままです。 この基本的な自然法則を次のように呼びます。運動量保存則 (LCM)
。 その結果はニュートンの法則です。 運動量形式のニュートンの第 2 法則は次のように記述できます。
この式から分かるように、物体系に外力が作用していない場合、または外力の作用が補償されている (合力がゼロである) 場合、運動量の変化はゼロになります。システムは保存されます:
同様に、選択した軸上の力の投影がゼロに等しいと推論できます。 外力がいずれかの軸に沿ってのみ作用しない場合、この軸への運動量の投影は保存されます。たとえば、次のようになります。 他の座標軸についても同様の記録が可能です。 いずれにしても、衝動自体は変化する可能性がありますが、その合計は一定であることを理解する必要があります。 多くの場合、運動量保存の法則により、値が活動部隊
未知。
運動量予測の保存
運動量保存の法則が部分的にのみ満たされる場合、つまり 1 つの軸に投影される場合にのみ、状況が発生する可能性があります。 物体に力が作用すると、その運動量は保存されません。 ただし、この軸への力の投影がゼロになるように、いつでも軸を選択できます。 この場合、この軸へのインパルスの投影は保存されます。 原則として、この軸は、物体が移動する表面に沿って選択されます。
FSI の多次元ケース。 ベクトル法 物体が 1 つの直線に沿って移動しない場合、一般的な場合

, 運動量保存則を適用するには、問題に関係するすべての座標軸に沿って記述する必要があります。 しかし、ベクトル法を使用すると、このような問題の解決が大幅に簡素化されます。 これは、衝突の前後に物体の 1 つが静止している場合に使用されます。 次に、運動量保存則は次のいずれかの方法で記述されます。
- ベクトルを追加するための規則から、これらの式内の 3 つのベクトルは三角形を形成する必要があることがわかります。 三角形の場合、コサイン定理が適用されます。
- 戻る
フォワード
物理学や数学などの CT の準備を適切に行うには、次の 3 つの最も重要な条件を満たす必要があります。
- このサイトの教材にあるすべてのトピックを学習し、すべてのテストと課題を完了してください。 これを行うには、何も必要ありません。つまり、物理学と数学の CT の準備、理論の勉強、問題の解決に毎日 3 ~ 4 時間を費やします。 実は、CTは物理や数学を知っているだけでは十分ではなく、素早く、失敗せずに解くことができることが求められる試験です。 多数ののタスク さまざまなトピックそして複雑さはさまざまです。 後者は何千もの問題を解くことによってのみ学ぶことができます。
- 物理学のすべての公式と法則、数学の公式と方法を学びます。 実はこれも非常に簡単にできるのですが、 必要な数式物理学ではピースは約 200 個しかありませんが、数学ではさらにそれよりもわずかです。 これらの主題にはそれぞれ、問題を解決するための標準的な方法が約 12 個あります。 基本レベル困難は学習することもできるため、適切なタイミングで完全に自動的に、困難なく解決されます。 ほとんどの CT。 この後は、最も難しいタスクについてのみ考える必要があります。
- 物理学と数学のリハーサル テストの 3 段階すべてに参加してください。 各 RT に 2 回アクセスして、両方のオプションを決定できます。 繰り返しになりますが、CT では、問題を迅速かつ効率的に解決する能力、公式と手法の知識に加えて、時間を適切に計画し、力を分散し、そして最も重要なことに、解答用紙に正確に記入することができなければなりません。答えと問題の数、または自分の姓を混同すること。 また、RT 中には、問題で質問するスタイルに慣れることが重要ですが、これは DT の準備ができていない人にとっては非常に珍しいと思われるかもしれません。
これら 3 つのポイントを正しく、熱心に、責任を持って実行することで、CT で自分の能力を最大限に発揮し、優れた結果を示すことができます。
間違いを見つけましたか?
エラーを見つけたと思われる場合は、 教材、その旨をメールで書いてください。 バグを報告することもできます ソーシャルネットワーク()。 手紙の中で、主題(物理学または数学)、トピックまたはテストの名前または番号、問題の番号、またはテキスト(ページ)内の誤りがあると思われる場所を示します。 疑わしいエラーが何であるかについても説明します。 あなたの手紙は見逃されることはなく、間違いは修正されるか、なぜ間違いではないのか説明されることになります。
物体の相互作用の結果、その座標と速度は継続的に変化する可能性があります。 物体間に作用する力も変化する可能性があります。 幸いなことに、私たちの周りの世界の変動に加えて、相互作用する物体のシステム全体を特徴づける特定の物理量の時間的不変性を主張する、いわゆる保存則によって決定される不変の背景もあります。
時間 t の間、質量 m の物体に一定の力が作用するとします。 この力の積とその作用時間を調べてみましょう  この体の状態の変化に関連しています。
この体の状態の変化に関連しています。
運動量保存の法則は、次のような対称性の基本的な性質によって存在します。 空間の均一性.
ニュートンの第 2 法則 (2.8) から、力の時間特性は運動量の変化 Fdt=dP に関係していることがわかります。
身体の衝動 P は、体の質量とその移動速度の積です。
 (2.14)
(2.14)
力積の単位はキログラム メートル/秒 (kg m/s) です。
力積は常に速度と同じ方向に向けられます。
現代の処方では 運動量保存の法則は言う : 閉鎖系で発生するプロセスでは、その総運動量は変化しません。

このこの法則が有効であることを証明してみましょう。 互いにのみ相互作用する 2 つの質点の動きを考えてみましょう (図 2.4)。
 このようなシステムは、他の物体との相互作用がないという意味で孤立していると言えます。 ニュートンの第 3 法則によると、これらの物体に作用する力は大きさが等しく、方向が反対です。
このようなシステムは、他の物体との相互作用がないという意味で孤立していると言えます。 ニュートンの第 3 法則によると、これらの物体に作用する力は大きさが等しく、方向が反対です。

ニュートンの第 2 法則を使用すると、これは次のように表現できます。


これらの式を組み合わせると、次のようになります。

運動量の概念を使用してこの関係を書き直してみましょう。

したがって、


量の変化がゼロであれば、その物理量は保存されます。 したがって、相互作用する 2 つの孤立点の力積の合計は、それらの間の相互作用の種類に関係なく一定のままであるという結論に達します。
 (2.15)
(2.15)
この結論は、相互に作用する物質点の任意の孤立系に一般化できます。 システムが閉じていない場合、つまり システムに作用する外力の合計はゼロに等しくありません。 F ≠ 0
、運動量保存則は満たされません。 重心

 (2.16)
(2.16)

システムの (慣性中心) は、座標が次の方程式で与えられる点です。
ここで、x 1; y1; z1; ×2; y2; z2; ...; xN; y N ; z N - システムの対応する質点の座標。
§2.5 エネルギー。 機械的な仕事と力 定量的測定さまざまな種類ある運動形態が別の運動形態に変換されると、エネルギーの変化が発生します。 同様に、動きがある物体から別の物体に伝達されると、ある物体のエネルギーが減少し、別の物体のエネルギーが増加します。 このような運動の移行と変換、そしてその結果としてのエネルギーは、作業の過程で発生する可能性があります。 力の影響下で物体が動くとき、または熱交換の過程で。
力 F の仕事を決定するには、質点が位置 1 から位置 2 に移動する曲線軌道 (図 2.5) を考えます。軌道を基本的な十分に小さな動き dr に分割しましょう。 このベクトルは質点の運動方向と一致します。 基本変位のモジュールを dS で表します。 |dr| = dS. 基本変位は非常に小さいため、この場合、力 F は変化しないと考えられ、基本仕事は一定の力の仕事の公式を使用して計算できます。
dA = F cosα dS = F cosα|dr|、(2.17)
またはベクトルのスカラー積として:
 (2.18)
(2.18)
E  初歩的な仕事
またはただの力の働き
は、力と基本変位ベクトルのスカラー積です。
初歩的な仕事
またはただの力の働き
は、力と基本変位ベクトルのスカラー積です。
すべての基本的な仕事を合計することによって、点 1 から点 2 までの軌道セクション上の可変力の仕事を決定できます (図 2.5 を参照)。 この問題は要約すると、次の積分を求めることになります。
 (2.19)
(2.19)
この依存関係をグラフで表すと (図 2.6)、必要な作業はグラフ上の影付きの図の面積によって決まります。
式 (2.22) および (2.23) のニュートンの第 2 法則とは対照的に、F は必ずしもすべての力の合力を意味するわけではなく、1 つの力または複数の力の合力であることに注意してください。
仕事にはポジティブなこともネガティブなこともあります。 基本仕事の符号は cosα の値に依存します。 したがって、たとえば、図 2.7 から、力 F、F tr および mg が作用する物体の水平面に沿って移動するとき、力 F の仕事は正 (α > 0) であることが明らかです。摩擦力 F tr は負 (α = 180°) で、重力 mg による仕事はゼロ (α = 90°) です。 力の接線成分 F t = F cos α であるため、基本仕事は F t と基本変位 dS の係数の積として計算されます。
dA = F t dS (2.20)
したがって、力の接線方向成分のみが仕事をし、力の法線成分 (α = 90°) は仕事をしません。
仕事の速度はパワーと呼ばれる量によって特徴付けられます。
力 はスカラー物理量と呼ばれ、作業が完了するまでの時間の比率に等しいためらう:
 (2.21)
(2.21)
(2.22) を考慮すると、次のようになります。
 (2.22)
(2.22)
または N = Fυcosα (2.23) 力 力ベクトルと速度ベクトルのスカラー積に等しい。
得られた式から、エンジン出力が一定の場合、速度が低いほど牽引力が大きくなることがわかります。  。 そのため、車のドライバーは、最大の牽引力が必要な上り坂でエンジンを低速に切り替えます。
。 そのため、車のドライバーは、最大の牽引力が必要な上り坂でエンジンを低速に切り替えます。










7 オンラインでの貿易と倉庫
都市伝説: アニチコフ橋、馬、クロッド
ルクソールのハトシェプスト女王葬祭殿 ハトシェプスト女王の肖像
敷居を超えて「こんにちは」「さようなら」が言えない理由 敷居を超えて送金してはいけない理由
世界の教育レベル - 国のランキングと比較